Các bộ PLC (Programmable Logic Controller) tiêu chuẩn yêu cầu phải có nguồn điện, bộ xử lý (CPU), mô đun định vị, cổng vào/ra và mô đun truyền thông, làm tăng chi phí.
Bất cứ điều gì cần thiết cho điều khiển chuyển động đều có thể được tích hợp vào mô-đun cơ bản.
Các cổng vào/ra và giao tiếp có thể được mở rộng bằng cách gắn các mô-đun tùy chọn khi cần thiết.
Các chương trình tương tự như MP2200 có thể được sử dụng để hỗ trợ đầy đủ các chức năng. Đây là bộ điều khiển đa năng mà bất kỳ mô-đun tùy chọn nào cũng gắn lên được.

| Tên | Model | Tích hợp | Số khe cắm | Số trục điều khiển tối đa | |||
|---|---|---|---|---|---|---|---|
| I/O | Communication | Servo Control | Số trục điều khiển tiêu chuẩn | ||||
| MP2300 | JEPMC-MP2300 | Input: 8 points, Output: 4 points |
- | MECHATROLINK-II×1 | 16 | 3 | 48 |
| MP2310 | JEPMC-MP2310-E | - | Ethernet×1 | 64 | |||
| MP2300S | JEPMC-MP2300S-E | - | 1 | 32 | |||
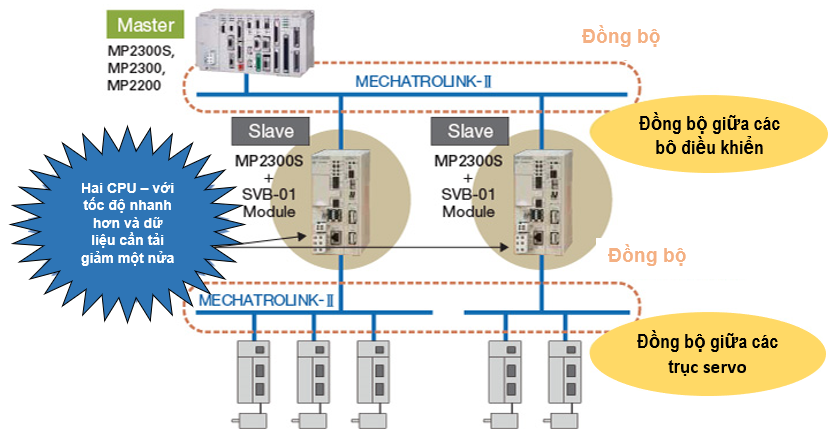
Khi chỉ sử dụng một bộ điều khiển, chu trình điều khiển sẽ dài hơn.
Chức năng đồng bộ hóa slave-CPU mới đã được thêm vào mạng chuyển động tiêu chuẩn MECHATROLINK-II trên MP2310 và MP2300S. Bằng cách kết nối bộ điều khiển slave với bộ điều khiển máy Series MP2000 master với MECHATROLINK, việc vận hành đồng bộ giữa các bộ điều khiển slave trở nên khả thi. Theo cách này, tổng tải có thể được chia ra, do đó tải của mỗi bộ điều khiển thụ động được giảm và có thể thực hiện hoạt động đồng bộ tốc độ cao cho các chuyển động đa trục.
 EN
EN VI
VI
